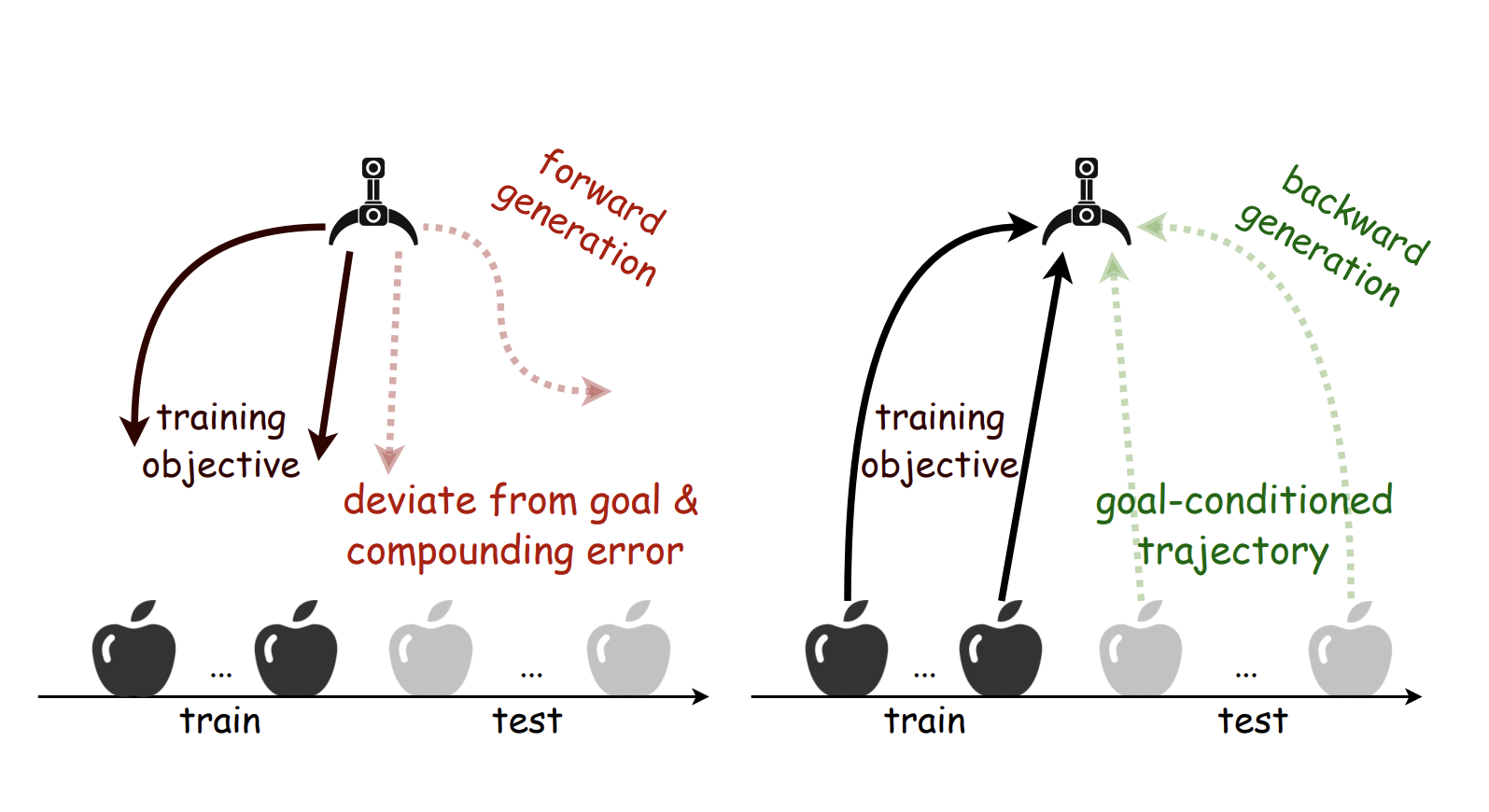
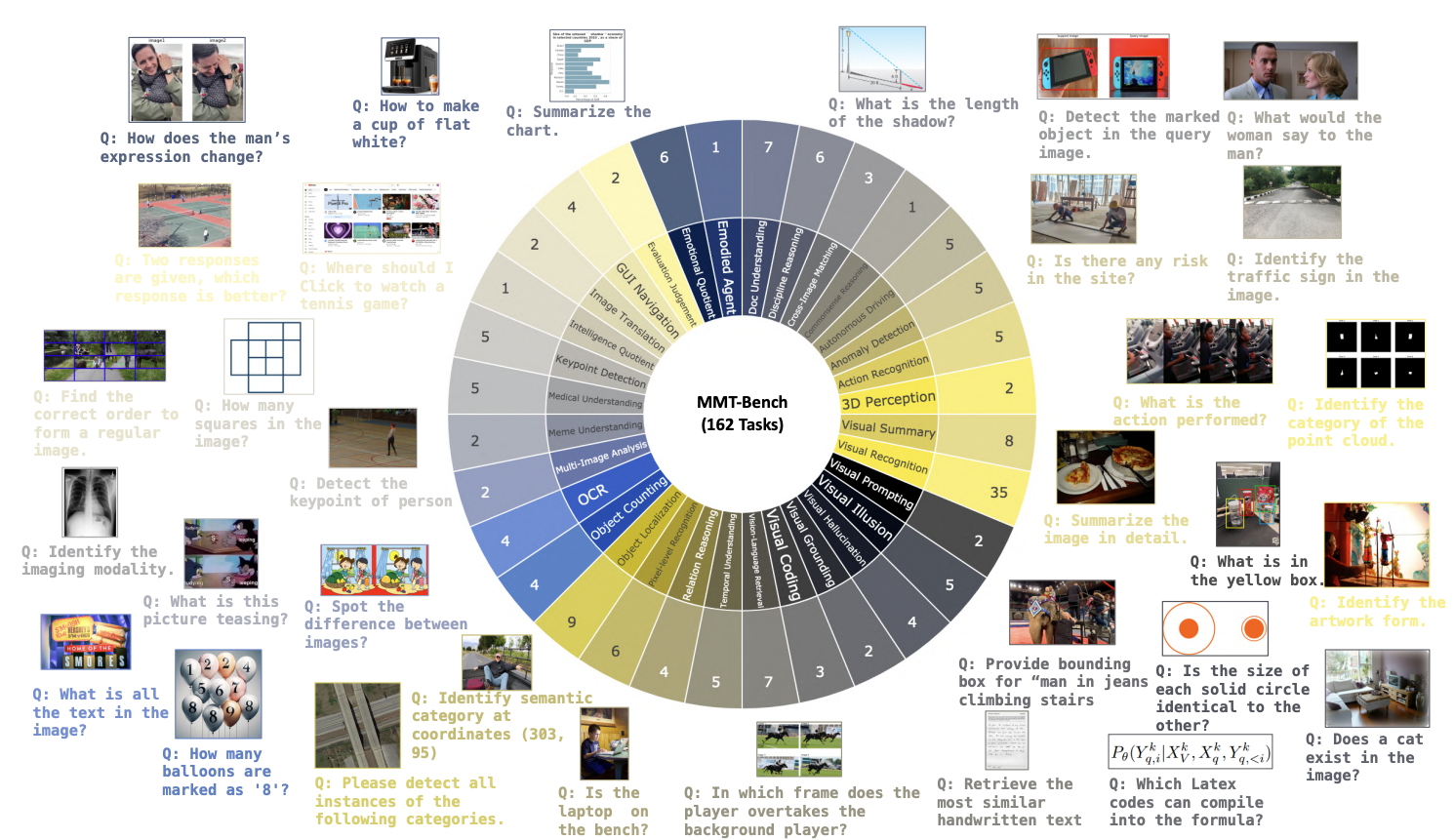
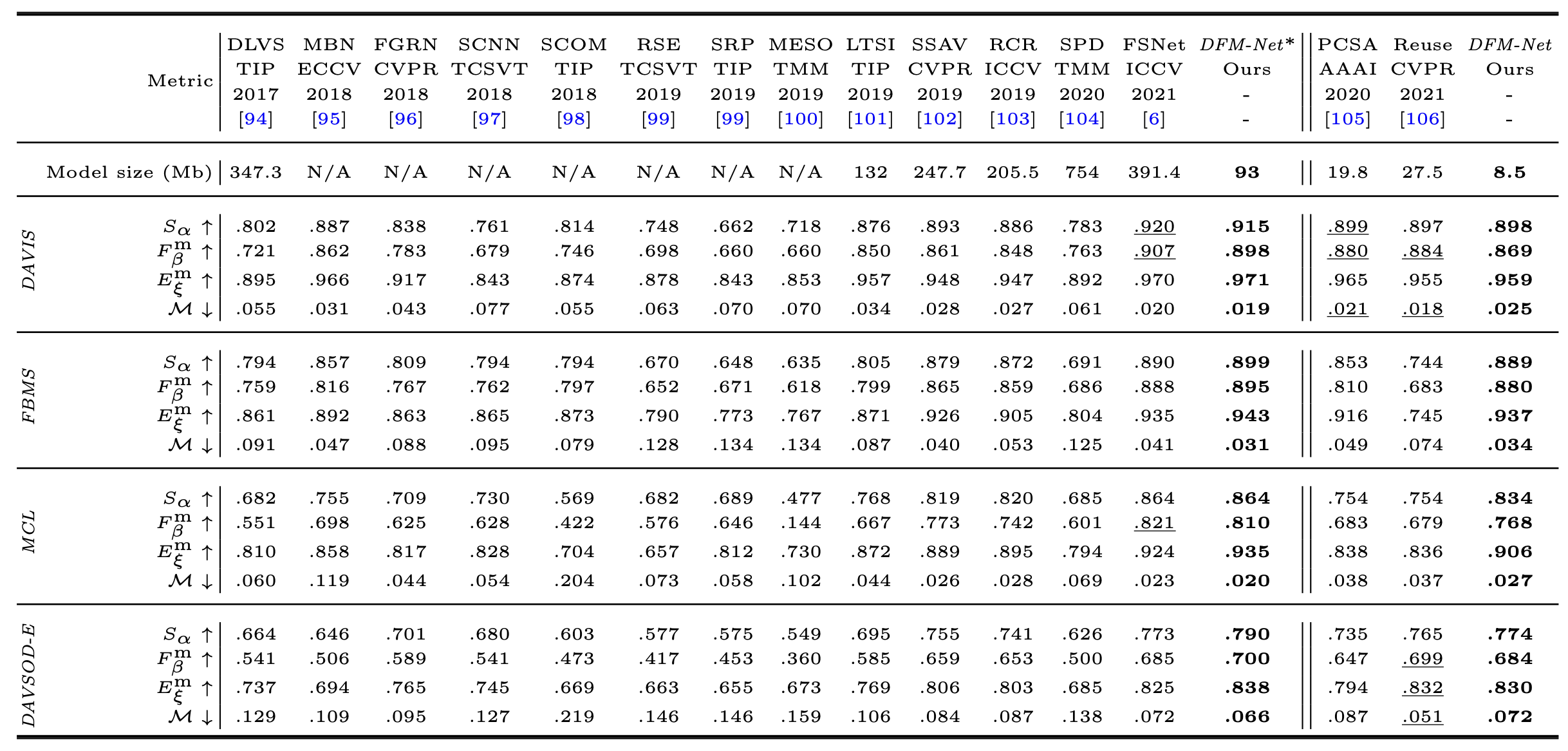
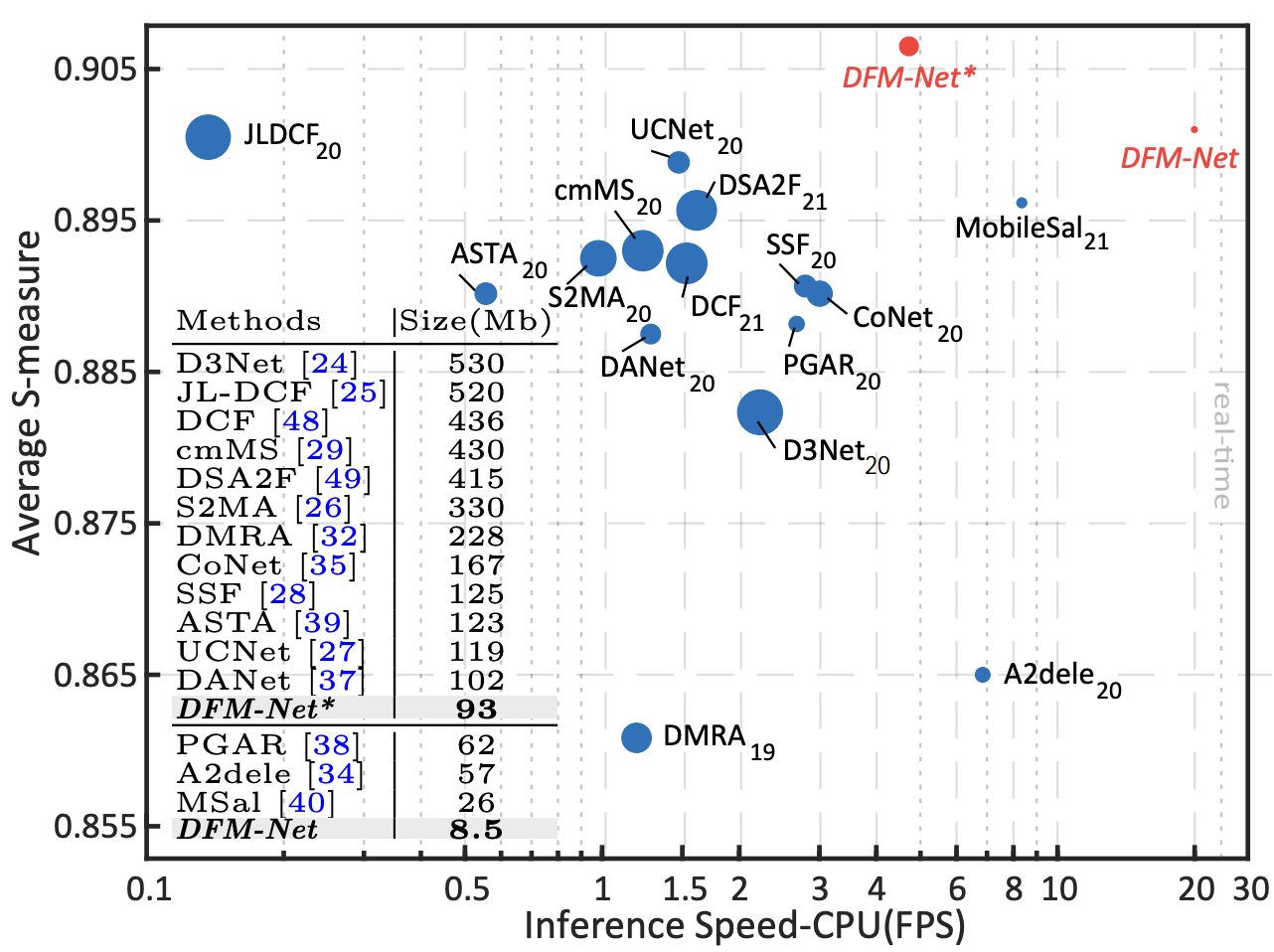
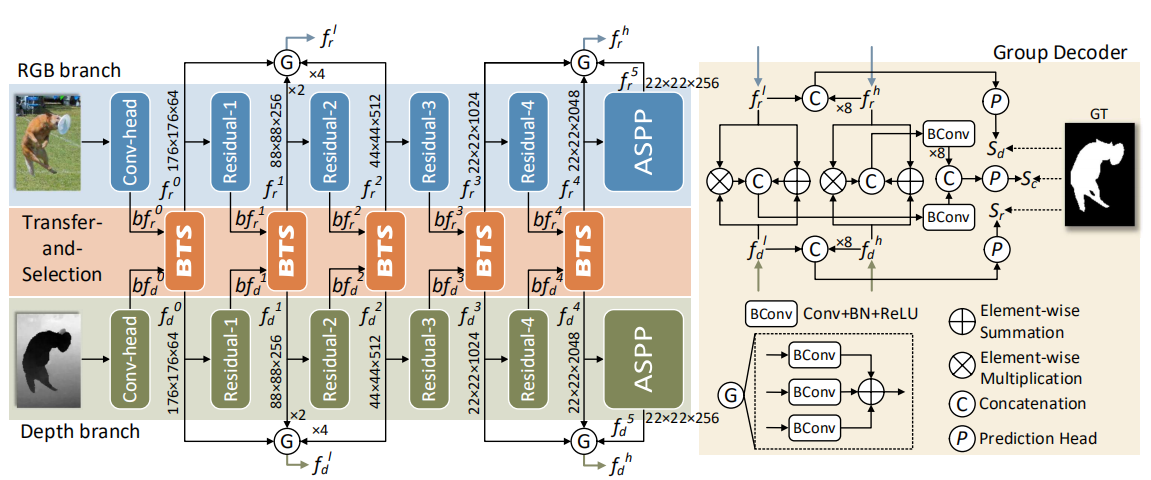
Google Scholar Chain-of-Action: Trajectory Autoregressive Modeling for Robotic Manipulation Wenbo Zhang , Tianrun Hu, Yanyuan Qiao, Hanbo Zhang, Yuchu Qin, Yang Li, Jiajun Liu, Tao Kong, Lingqiao Liu, and Xiao Ma NeurIPS 2025 | [ arXiv Code Website ] Effective Tuning Strategies for Generalist Robot Manipulation Policies Wenbo Zhang , Yang Li, Yanyuan Qiao, Siyuan Huang, Jiajun Liu, Feras Dayoub, Xiao Ma, and Lingqiao Liu ICRA 2025 | [ arXiv ] Mmt-bench: A comprehensive multimodal benchmark for evaluating large vision-language models towards multitask agi Kaining Ying, Fanqing Meng, Jin Wang, Zhiqian Li, Han Lin, Yue Yang, Hao Zhang, Wenbo Zhang , Yuqi Lin, Shuo Liu, and others ICLR 2024 | [ arXiv Code ] MEANet: Multi-modal edge-aware network for light field salient object detection Yao Jiang, Wenbo Zhang , Keren Fu, and Qijun Zhao Neurocomputing 2022 | [ HTML Code ] Depth Quality-Inspired Feature Manipulation for Efficient RGB-D and Video Salient Object Detection Wenbo Zhang , Keren Fu, Zhuo Wang, Ge-Peng Ji, and Qijun Zhao Preprint 2022 | [ arXiv Code ] Depth quality-inspired feature manipulation for efficient RGB-D salient object detection Wenbo Zhang , Ge-Peng Ji, Zhuo Wang, Keren Fu, and Qijun Zhao ACM MM 2021 | [ arXiv Code Zhihu ] BTS-Net: Bi-directional Transfer-and-Selection Network for RGB-D Salient Object Detection Wenbo Zhang , Yao Jiang, Keren Fu, and Qijun Zhao ICME 2021 | [ arXiv Code ]
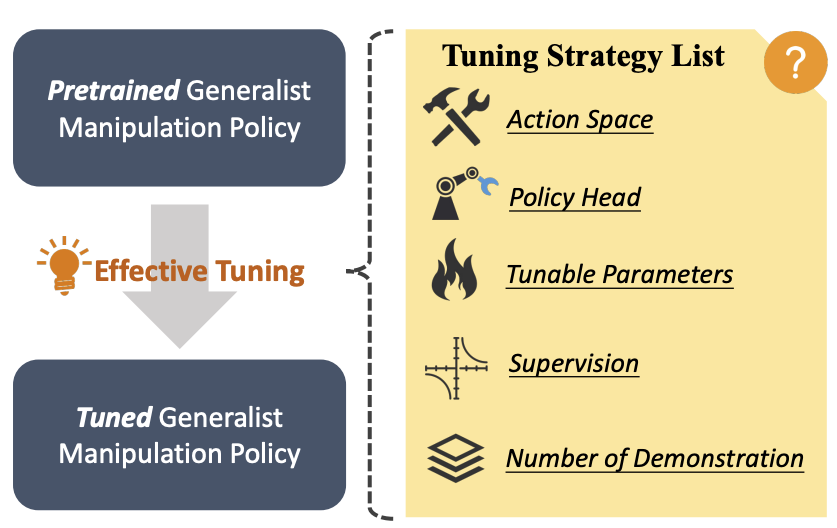 Effective Tuning Strategies for Generalist Robot Manipulation PoliciesICRA 2025 | [ arXiv ]
Effective Tuning Strategies for Generalist Robot Manipulation PoliciesICRA 2025 | [ arXiv ]